Radiance Field Reconstruction (NeRF-like)¶
In this tutorial, we will learn how to implement a 3D scene reconstruction pipeline similar to the one presented in the following work: ReLU Fields: The Little Non-linearity That Could. This simple NeRF-like method reconstructs the radiance field of a scene without the use of any neural networks or sparse data structures. It models a scene as a purely emissive volume with a directionally varying emission. The volume density is modeled by interpolated 3D grid values that are passed through a fixed non-linearity (ReLU) to boost sharpness. The view-dependent appearance is represented using spherical harmonics (SH), with coefficients stored on a regular grid. For a given ray, the outgoing radiance is evaluated using ray marching. By differentiating through the ray marching routine, the density and SH coefficients can be fit to a set of reference images.
This algorithm is simple and surprisingly powerful, and very easy to implement using the built-in functionality of Mitsuba and Dr.Jit.
🚀 You will learn how to:
Implement a custom adjoint PRB-style integrator
Use the Dr.Jit’s spherical harmonics routines
Use mi.ad.loaders.RayDataLoader to optimize on pixel batches
Schedule up-scaling of the optimized voxel grids during the optimization
Setup¶
As usual, we first import Mitsuba and Dr.Jit and set a variant that supports automatic differentiation.
[ ]:
import drjit as dr
import mitsuba as mi
mi.set_variant('cuda_ad_rgb', 'llvm_ad_rgb')
For convenience, we define a helper function to plot a list of images in one row:
[2]:
import matplotlib.pyplot as plt
def plot_list(images, title=None):
fig, axs = plt.subplots(1, len(images), figsize=(18, 3))
for i in range(len(images)):
axs[i].imshow(mi.util.convert_to_bitmap(images[i]))
axs[i].axis('off')
if title is not None:
plt.suptitle(title)
Parameters¶
We now define a few parameters for the optimization pipeline implemented below. The optimization will start at a low resolution and then resample the optimized volume parameters every num_passes_per_stage full passes over the reference pixels. This will be done a total of num_stages times. This coarse-to-fine scheme improves convergence and is a common heuristic used in differentiable rendering.
[3]:
# Rendering resolution
render_res = 256
# Number of stages
num_stages = 4
# Number of full passes over the reference pixels per stage
num_passes_per_stage = 15
# learning rate
learning_rate = 0.05
# Initial grid resolution
grid_init_res = 16
# Spherical harmonic degree to be use for view-dependent appearance modeling
sh_degree = 2
# Enable ReLU in integrator
use_relu = True
# Number of sensors
sensor_count = 7
# Number of target pixels used per optimization step. One image-worth of pixels
# keeps the memory footprint comparable to a single full-image render while the
# data loader samples across all sensors.
pixels_per_batch = render_res * render_res
Creating multiple sensors¶
As done in many of the other tutorials, we instantiate a couple of sensors to render our synthetic scene from different viewpoints. Here the cameras are placed in a circle around the [0.5, 0.5, 0.5] point which is going to be the center of our voxel grids.
[5]:
sensors = []
for i in range(sensor_count):
angle = 360.0 / sensor_count * i
sensors.append(mi.load_dict({
'type': 'perspective',
'fov': 45,
'to_world': mi.ScalarTransform4f().translate([0.5, 0.5, 0.5]) \
.rotate([0, 1, 0], angle) \
.look_at(target=[0, 0, 0],
origin=[0, 0, 1.3],
up=[0, 1, 0]),
'film': {
'type': 'hdrfilm',
'width': render_res,
'height': render_res,
'filter': {'type': 'box'},
'pixel_format': 'rgba',
'sample_border': False
}
}))
Rendering synthetic reference images¶
For this tutorial we will attempt to reconstruct a synthetic 3D scene also used in the other related works. We load the scene and render the reference images for all different viewpoints. NOTE: Please ignore the “Download data” button at the top of this page. This example requires the following different scene file.
[6]:
scene_ref = mi.load_file('../scenes/lego/scene.xml')
ref_images = [mi.render(scene_ref, sensor=sensors[i], spp=64) for i in range(sensor_count)]
plot_list(ref_images, 'Reference images')

NeRF-like PRB integrator¶
Unlike the other tutorials, this pipeline doesn’t use any of the conventional physically-based rendering algorithms such as path-tracing. Instead, it implements a differentiable integrator for emissive volumes that directly uses a density and SH coefficient grid.
We define an integrator RadianceFieldPRB that inherits from mi.ad.common.RBIntegrator. The RBIntegrator class is meant to be used to implement differentiable integrators that rely on tracing light paths to estimate derivatives (in contrast to purely using automatic differentiation). In the Mitsuba code base, this integrator base class is primarily used to implement various versions of path replay backpropagation.
In the following implementation, we use this interface to implement a differentiable rendering method for purely emissive volumes (we don’t consider scattering or indirect effects). We will use the path replay algorithm to implement a ray marching routine that does not need to allocate any large temporary buffers to differentiate the rendering process. This means that the memory use of this implementation will only depend on the size of the parameter grids, and not on the number of rays being evaluated at once.
We implement the functions __init__, eval_emission sample, traverse and parameters_changed.
In __init__ we initialize a bounding box for our volume as well as 3D textures storing the density (sigmat) and SH coefficients (sh_coeffs). The number of channels for the SH coefficients depends on the chosen sh_degree (default: 2).
The traverse function simply returns the differentiable parameters and parameters_changed updates the 3D textures in case the differentiable parameters were updated (e.g., by a gradient step). The update of the 3D textures is necessary for Mitsuba variants where hardware-accelerated texture interpolation is used (i.e., cuda_ad_rgb). By invoking texture.set_tensor(texture.tensor()), we force Dr.Jit to update the underlying hardware texture.
The main ray marching implementation is inside the sample function. This function returns the radiance along a single input ray. We first check if the ray intersects the volume’s bounding box. We then use an mi.Loop to perform the ray marching routine. Inside the loop, we evaluate the density and spherical harmonics coefficients at the current point p. We accumulate radiance in a variable L and use β to store the current throughput. The directionally varying emission is
evaluated using the eval_emission helper function.
The sample function is written such that it can both be used for the primal computation (primal = True) and to accumulate gradients in reverse mode (primal = False).
When computing the parameter gradients, we pass the gradient of the objective function (δL) and the output of the primal computation (state_in). Instead of accumulating radiance in the variable L, we initialize L from the primal output and then iteratively subtract emitted radiance to reconstruct gradient values. The dr.backward_from call backpropagates gradients all the way to the two 3D textures.
In reverse mode, a significant part of the computation inside the loop is evaluated with gradients enabled. The dr.resume_grad scope enables gradients selectively inside the with block. The algorithm is designed to not build any AD graph across loop iterations.
For a more detailed explanation of path replay, please see the paper.
[7]:
class RadianceFieldPRB(mi.python.ad.integrators.common.RBIntegrator):
def __init__(self, props=mi.Properties()):
super().__init__(props)
self.bbox = mi.ScalarBoundingBox3f([0.0, 0.0, 0.0], [1.0, 1.0, 1.0])
self.use_relu = use_relu
self.grid_res = grid_init_res
# Initialize the 3D texture for the density and SH coefficients
res = self.grid_res
self.sigmat = mi.Texture3f(dr.full(mi.TensorXf, 0.01, shape=(res, res, res, 1)))
self.sh_coeffs = mi.Texture3f(dr.full(mi.TensorXf, 0.1, shape=(res, res, res, 3 * (sh_degree + 1) ** 2)))
def eval_emission(self, pos, direction):
spec = mi.Spectrum(0)
sh_dir_coef = dr.sh_eval(direction, sh_degree)
sh_coeffs = self.sh_coeffs.eval(pos)
for i, sh in enumerate(sh_dir_coef):
spec += sh * mi.Spectrum(sh_coeffs[3 * i:3 * (i + 1)])
return dr.clip(spec, 0.0, 1.0)
@dr.syntax
def sample(self, mode, scene, sampler,
ray, δL, state_in, active, **kwargs):
primal = mode == dr.ADMode.Primal
ray = mi.Ray3f(ray)
hit, mint, maxt = self.bbox.ray_intersect(ray)
active = mi.Bool(active)
active &= hit # ignore rays that miss the bbox
if not primal: # if the gradient is zero, stop early
active &= dr.any(δL != 0)
step_size = mi.Float(1.0 / self.grid_res)
t = mi.Float(mint) + sampler.next_1d(active) * step_size
L = mi.Spectrum(0.0 if primal else state_in)
δL = mi.Spectrum(δL if δL is not None else 0)
β = mi.Spectrum(1.0) # throughput
while active:
p = ray(t)
with dr.resume_grad(when=not primal):
sigmat = self.sigmat.eval(p)[0]
if self.use_relu:
sigmat = dr.maximum(sigmat, 0.0)
tr = dr.exp(-sigmat * step_size)
# Evaluate the directionally varying emission (weighted by transmittance)
Le = β * (1.0 - tr) * self.eval_emission(p, ray.d)
β *= tr
L = L + Le if primal else L - Le
with dr.resume_grad(when=not primal):
if not primal:
dr.backward_from(δL * (L * tr / dr.detach(tr) + Le))
t += step_size
active &= (t < maxt) & dr.any(β != 0.0)
return L if primal else δL, mi.Bool(True), [], L
def traverse(self, cb):
cb.put("sigmat", self.sigmat.tensor(), mi.ParamFlags.Differentiable)
cb.put('sh_coeffs', self.sh_coeffs.tensor(), mi.ParamFlags.Differentiable)
def parameters_changed(self, keys):
self.sigmat.update_inplace()
self.sh_coeffs.update_inplace()
self.grid_res = self.sigmat.shape[0]
mi.register_integrator("rf_prb", lambda props: RadianceFieldPRB(props))
Setting up the optimization scene¶
Here we set up our simple optimization scene. It is only composed of a constant area light and a RadianceFieldPRB integrator. No geometry or volume instance is needed since the integrator itself already contains the feature voxel grid.
As shown in the rendered initial state, the scene appears empty at first as the density grid was initialized with a very low density value.
[8]:
scene = mi.load_dict({
'type': 'scene',
'integrator': {
'type': 'rf_prb'
},
'emitter': {
'type': 'constant'
}
})
integrator = scene.integrator()
# Render initial state
init_images = [mi.render(scene, sensor=sensors[i], spp=128) for i in range(sensor_count)]
plot_list(init_images, 'Initialization')

Optimization¶
We use an Adam optimizer in this pipeline. The constructor of the optimizer takes the learning rate as well as a dictionary of optimized variables. In this tutorial, we want to optimize the density and spherical harmonics coefficients grids. We call params.update(opt) to ensure that the integrator is notified that some parameters now have gradients enabled.
[9]:
params = mi.traverse(integrator)
opt = mi.ad.Adam(lr=learning_rate, params={'sigmat': params['sigmat'], 'sh_coeffs': params['sh_coeffs']})
params.update(opt);
ray_loader = mi.ad.loaders.RayDataLoader(
sensors=sensors,
target_images=ref_images,
pixels_per_batch=pixels_per_batch,
seed=0
)
num_iterations_per_stage = num_passes_per_stage * ray_loader.iter_shuffle
Finally comes the main optimization loop of the pipeline. Instead of rendering every full image at each optimizer step, we ask RayDataLoader for a batch of target pixels and a matching sensor that only traces those rays. We then back-propagate the gradients through an L1 loss on this pixel batch.
For convenience we render and store full intermediate views at the end of every stage to further inspect the optimization progress.
Moreover, as stated earlier in this tutorial, we resample the feature voxel grids to twice their previous resolution at the end of every stage. This can easily be achieved using the dr.resample() routine.
[10]:
losses = []
intermediate_images = []
for stage in range(num_stages):
print(f"Stage {stage+1:02d}, feature voxel grids resolution -> {opt['sigmat'].shape[0]}")
for it in range(num_iterations_per_stage):
target_batch, batch_sensor = ray_loader.next()
seed = stage * num_iterations_per_stage + it
img = mi.render(scene, params=params, sensor=batch_sensor, spp=1, seed=seed)
loss = sensor_count * dr.mean(dr.abs(img - target_batch), axis=None)
dr.backward(loss)
losses.append(loss.array[0])
opt.step()
if not integrator.use_relu:
opt['sigmat'] = dr.maximum(opt['sigmat'], 0.0)
params.update(opt)
print(f" --> batch {it+1:03d}/{num_iterations_per_stage}: error={loss}", end='\r')
images = [mi.render(scene, sensor=sensors[i], spp=1, seed=stage)
for i in range(sensor_count)]
dr.eval(*images)
intermediate_images.append(images)
# Resample the 3D textures at every stage
if stage < num_stages - 1:
new_res = 2 * opt['sigmat'].shape[0]
new_shape = (new_res, new_res, new_res)
opt['sigmat'] = dr.resample(
opt['sigmat'], new_shape + (opt['sigmat'].shape[-1],)
)
opt['sh_coeffs'] = dr.resample(
opt['sh_coeffs'], new_shape + (opt['sh_coeffs'].shape[-1],)
)
params.update(opt)
print('')
print('Done')
Stage 01, feature voxel grids resolution -> 16
Stage 02, feature voxel grids resolution -> 32
Stage 03, feature voxel grids resolution -> 64
Stage 04, feature voxel grids resolution -> 128
--> batch 105/105: error=1.32435
Done
Results¶
We render the final images at higher SPP and display the results at every stages as well as the reference images.
[11]:
final_images = [mi.render(scene, sensor=sensors[i], spp=128) for i in range(sensor_count)]
for stage, inter in enumerate(intermediate_images):
plot_list(inter, f'Stage {stage}')
plot_list(final_images, 'Final')
plot_list(ref_images, 'Reference')






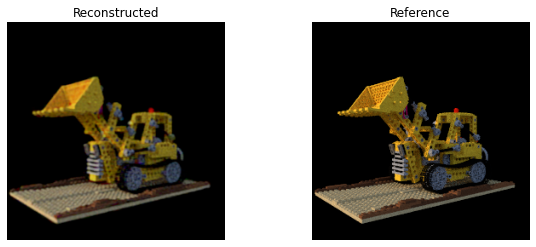
We can also take a closer look at one of the view point:
[12]:
fig, axs = plt.subplots(1, 2, figsize=(10, 4))
axs[0].imshow(mi.util.convert_to_bitmap(final_images[1]))
axs[0].set_title('Reconstructed')
axs[0].axis('off')
axs[1].imshow(mi.util.convert_to_bitmap(ref_images[1]))
axs[1].set_title('Reference')
axs[1].axis('off');
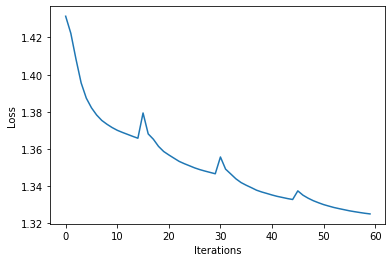
When working with optimization pipelines, it is always very informative to take a look at the graph of objective function values.
[13]:
plt.plot(losses)
plt.xlabel('Iterations')
plt.ylabel('Loss')
[13]:
Text(0, 0.5, 'Loss')